一、前言
随着深度学习在图像、语言、广告点击率预估等各个领域不断发展,很多团队开始探索深度学习技术在业务层面的实践与应用。而在广告CTR预估方面,新模型也是层出不穷: Wide and Deep[1]、DeepCross Network[2]、DeepFM[3]、xDeepFM[4],美团很多篇深度学习博客也做了详细的介绍。但是,当离线模型需要上线时,就会遇见各种新的问题: 离线模型性能能否满足线上要求、模型预估如何镶入到原有工程系统等等。只有准确的理解深度学习框架,才能更好地将深度学习部署到线上,从而兼容原工程系统、满足线上性能要求。
本文首先介绍下美团平台用户增长组业务场景及离线训练流程,然后主要介绍我们使用TensorFlow Serving部署WDL模型到线上的全过程,以及如何优化线上服务性能,希望能对大家有所启发。
二、业务场景及离线流程
2.1 业务场景
在广告精排的场景下,针对每个用户,最多会有几百个广告召回,模型根据用户特征与每一个广告相关特征,分别预估该用户对每条广告的点击率,从而进行排序。由于广告交易平台(AdExchange)对于DSP的超时时间限制,我们的排序模块平均响应时间必须控制在10ms以内,同时美团DSP需要根据预估点击率参与实时竞价,因此对模型预估性能要求比较高。
2.2 离线训练
离线数据方面,我们使用Spark生成TensorFlow[5]原生态的数据格式tfrecord,加快数据读取。
模型方面,使用经典的Wide and Deep模型,特征包括用户维度特征、场景维度特征、商品维度特征。Wide 部分有 80多特征输入,Deep部分有60多特征输入,经过Embedding输入层大约有600维度,之后是3层256等宽全连接,模型参数一共有35万参数,对应导出模型文件大小大约11M。
离线训练方面,使用TensorFlow同步 + Backup Workers[6]的分布式框架,解决异步更新延迟和同步更新性能慢的问题。
在分布式ps参数分配方面,使用GreedyLoadBalancing方式,根据预估参数大小分配参数,取代Round Robin取模分配的方法,可以使各个PS负载均衡。
计算设备方面,我们发现只使用CPU而不使用GPU,训练速度会更快,这主要是因为尽管GPU计算上性能可能会提升,但是却增加了CPU与GPU之间数据传输的开销,当模型计算并不太复杂时,使用CPU效果会更好些。
同时我们使用了Estimator高级API,将数据读取、分布式训练、模型验证、TensorFlow Serving模型导出进行封装。
使用Estimator的主要好处在于:
- 单机训练与分布式训练可以很简单的切换,而且在使用不同设备:CPU、GPU、TPU时,无需修改过多的代码。
- Estimator的框架十分清晰,便于开发者之间的交流。
- 初学者还可以直接使用一些已经构建好的Estimator模型:DNN模型、XGBoost模型、线性模型等。
三、TensorFlow Serving及性能优化
3.1 TensorFlow Serving介绍
TensorFlow Serving是一个用于机器学习模型Serving的高性能开源库,它可以将训练好的机器学习模型部署到线上,使用gRPC作为接口接受外部调用。TensorFlow Serving支持模型热更新与自动模型版本管理,具有非常灵活的特点。
下图为TensorFlow Serving整个框架图。Client端会不断给Manager发送请求,Manager会根据版本管理策略管理模型更新,并将最新的模型计算结果返回给Client端。
![TensorFlow Serving架构,图片来源于TensorFlow Serving官方文档]()
TensorFlow Serving架构,图片来源于TensorFlow Serving官方文档
美团内部由数据平台提供专门TensorFlow Serving通过YARN分布式地跑在集群上,其周期性地扫描HDFS路径来检查模型版本,并自动进行更新。当然,每一台本地机器都可以安装TensorFlow Serving进行试验。
在我们站外广告精排的场景下,每来一位用户时,线上请求端会把该用户和召回所得100个广告的所有信息,转化成模型输入格式,然后作为一个Batch发送给TensorFlow Serving,TensorFlow Serving接受请求后,经过计算得到CTR预估值,再返回给请求端。
部署TensorFlow Serving的第一版时,QPS大约200时,打包请求需要5ms,网络开销需要固定3ms左右,仅模型预估计算需要10ms,整个过程的TP50线大约18ms,性能完全达不到线上的要求。接下来详细介绍下我们性能优化的过程。
3.2 性能优化
3.2.1 请求端优化
线上请求端优化主要是对一百个广告进行并行处理,我们使用OpenMP多线程并行处理数据,将请求时间性能从5ms降低到2ms左右。
#pragma omp parallel for
for (int i = 0; i < request->ad_feat_size(); ++i) {
tensorflow::Example example;
data_processing();
}
3.2.2 构建模型OPS优化
在没有进行优化之前,模型的输入是未进行处理的原格式数据,例如,渠道特征取值可能为:'渠道1'、'渠道2' 这样的string格式,然后在模型里面做One Hot处理。
最初模型使用了大量的高阶tf.feature_column对数据进行处理, 转为One Hot和embedding格式。 使用tf.feature_column的好处是,输入时不需要对原数据做任何处理,可以通过feature_column API在模型内部对特征做很多常用的处理,例如:tf.feature_column.bucketized_column可以做分桶,tf.feature_column.crossed_column可以对类别特征做特征交叉。但特征处理的压力就放在了模型里。
为了进一步分析使用feature_column的耗时,我们使用tf.profiler工具,对整个离线训练流程耗时做了分析。在Estimator框架下使用tf.profiler是非常方便的,只需加一行代码即可。
with tf.contrib.tfprof.ProfileContext(job_dir + ‘/tmp/train_dir’) as pctx:
estimator = tf.estimator.Estimator(model_fn=get_model_fn(job_dir),
config=run_config,
params=hparams)
下图为使用tf.profiler,网络在向前传播的耗时分布图,可以看出使用feature_column API的特征处理耗费了很大时间。
![优化前profiler记录]()
优化前profiler记录, 前向传播的耗时占总训练时间55.78%,主要耗费在feature_column OPS对原始数据的预处理
为了解决特征在模型内做处理耗时大的问题,我们在处理离线数据时,把所有string格式的原生数据,提前做好One Hot的映射,并且把映射关系落到本地feature_index文件,进而供线上线下使用。这样就相当于把原本需要在模型端计算One Hot的过程省略掉,替代为使用词典做O(1)的查找。同时在构建模型时候,使用更多性能有保证的低阶API替代feature_column这样的高阶API。下图为性能优化后,前向传播耗时在整个训练流程的占比。可以看出,前向传播的耗时占比降低了很多。
![优化后profiler记录]()
优化后profiler记录,前向传播耗时占总训练时间39.53%
3.2.3 XLA,JIT编译优化
TensorFlow采用有向数据流图来表达整个计算过程,其中Node代表着操作(OPS),数据通过Tensor的方式来表达,不同Node间有向的边表示数据流动方向,整个图就是有向的数据流图。
XLA(Accelerated Linear Algebra)是一种专门对TensorFlow中线性代数运算进行优化的编译器,当打开JIT(Just In Time)编译模式时,便会使用XLA编译器。整个编译流程如下图所示:
![tensorflow计算流程]()
TensorFlow计算流程
首先TensorFlow整个计算图会经过优化,图中冗余的计算会被剪掉。HLO(High Level Optimizer)会将优化后的计算图 生成HLO的原始操作,XLA编译器会对HLO的原始操作进行一些优化,最后交给LLVM IR根据不同的后端设备,生成不同的机器代码。
JIT的使用,有助于LLVM IR根据 HLO原始操作生成 更高效的机器码;同时,对于多个可融合的HLO原始操作,会融合成一个更加高效的计算操作。但是JIT的编译是在代码运行时进行编译,这也意味着运行代码时会有一部分额外的编译开销。
![jit性能影响]()
网络结构、Batch Size对JIT性能影响[7]
上图显示为不同网络结构,不同Batch Size下使用JIT编译后与不使用JIT编译的耗时之比。可以看出,较大的Batch Size性能优化比较明显,层数与神经元个数变化对JIT编译优化影响不大。
在实际的应用中,具体效果会因网络结构、模型参数、硬件设备等原因而异。
3.2.4 最终性能
经过上述一系列的性能优化,模型预估时间从开始的10ms降低到1.1ms,请求时间从5ms降到2ms。整个流程从打包发送请求到收到结果,耗时大约6ms。
![模型计算时间相关参数:QPS: 1308, 50line: 1.1ms,999line: 3.0ms。下面四个图分别为: 耗时分布图显示大部分耗时控制在1ms内; 请求次数显示每分钟请求大约8万次,折合QPS为1308; 平均耗时时间为1.1ms; 成功率为100%]()
模型计算时间相关参数:QPS:1308,50line:1.1ms,999line:3.0ms。下面四个图分别为:耗时分布图显示大部分耗时控制在1ms内;请求次数显示每分钟请求大约8万次,折合QPS为1308;平均耗时时间为1.1ms;成功率为100%
3.3 模型切换毛刺问题
通过监控发现,当模型进行更新时,会有大量的请求超时。如下图所示,每次更新都会导致有大量请求超时,对系统的影响较大。通过TensorFlow Serving日志和代码分析发现,超时问题主要源于两个方面,一方面,更新、加载模型和处理TensorFlow Serving请求的线程共用一个线程池,导致切换模型时候无法处理请求;另一方面,模型加载后,计算图采用Lazy Initialization方式,导致第一次请求需要等待计算图初始化。
![模型切换导致请求超时]()
模型切换导致请求超时
问题一主要是因为加载和卸载模型线程池配置问题,在源代码中:
uint32 num_load_threads = 0;
uint32 num_unload_threads = 0;
这两个参数默认为 0,表示不使用独立线程池,和Serving Manager在同一个线程中运行。修改成1便可以有效解决此问题。
模型加载的核心操作为RestoreOp,包括从存储读取模型文件、分配内存、查找对应的Variable等操作,其通过调用Session的run方法来执行。而默认情况下,一个进程内的所有Session的运算均使用同一个线程池。所以导致模型加载过程中加载操作和处理Serving请求的运算使用同一线程池,导致Serving请求延迟。解决方法是通过配置文件设置,可构造多个线程池,模型加载时指定使用独立的线程池执行加载操作。
对于问题二,模型首次运行耗时较长的问题,采用在模型加载完成后提前进行一次Warm Up运算的方法,可以避免在请求时运算影响请求性能。这里使用Warm Up的方法是,根据导出模型时设置的Signature,拿出输入数据的类型,然后构造出假的输入数据来初始化模型。
通过上述两方面的优化,模型切换后请求延迟问题得到很好的解决。如下图所示,切换模型时毛刺由原来的84ms降低为4ms左右。
![优化后模型切换超时问题得到很大提升]()
优化后模型切换后,毛刺降低
四、总结与展望
本文主要介绍了用户增长组基于Tensorflow Serving在深度学习线上预估的探索,对性能问题的定位、分析、解决;最终实现了高性能、稳定性强、支持各种深度学习模型的在线服务。
在具备完整的离线训练与在线预估框架基础之后,我们将会加快策略的快速迭代。在模型方面,我们可以快速尝试新的模型,尝试将强化学习与竞价结合;在性能方面,结合工程要求,我们会对TensorFlow的图优化、底层操作算子、操作融合等方面做进一步的探索;除此之外,TensorFlow Serving的预估功能可以用于模型分析,谷歌也基于此推出What-If-Tools来帮助模型开发者对模型深入分析。最后,我们也会结合模型分析,对数据、特征再做重新的审视。
参考文献
[1] Cheng, H. T., Koc, L., Harmsen, J., Shaked, T., Chandra, T., Aradhye, H., ... & Anil, R. (2016, September). Wide & deep learning for recommender systems. In Proceedings of the 1st Workshop on Deep Learning for Recommender Systems (pp. 7-10). ACM.
[2] Wang, R., Fu, B., Fu, G., & Wang, M. (2017, August). Deep & cross network for ad click predictions. In Proceedings of the ADKDD'17 (p. 12). ACM.
[3] Guo, H., Tang, R., Ye, Y., Li, Z., & He, X. (2017). Deepfm: a factorization-machine based neural network for ctr prediction. arXiv preprint arXiv:1703.04247.
[4] Lian, J., Zhou, X., Zhang, F., Chen, Z., Xie, X., & Sun, G. (2018). xDeepFM: Combining Explicit and Implicit Feature Interactions for Recommender Systems. arXiv preprint arXiv:1803.05170.
[5] Abadi, M., Barham, P., Chen, J., Chen, Z., Davis, A., Dean, J., ... & Kudlur, M. (2016, November). TensorFlow: a system for large-scale machine learning. In OSDI (Vol. 16, pp. 265-283).
[6] Goyal, P., Dollár, P., Girshick, R., Noordhuis, P., Wesolowski, L., Kyrola, A., ... & He, K. (2017). Accurate, large minibatch SGD: training imagenet in 1 hour. arXiv preprint arXiv:1706.02677.
[7] Neill, R., Drebes, A., Pop, A. (2018). Performance Analysis of Just-in-Time Compilation for Training TensorFlow Multi-Layer Perceptrons.
作者简介
仲达,2017年毕业于美国罗彻斯特大学数据科学专业,后在加州湾区Stentor Technology Company工作,2018年加入美团,主要负责用户增长组深度学习、强化学习落地业务场景工作。
鸿杰,2015年加入美团点评。美团平台与酒旅事业群用户增长组算法负责人,曾就职于阿里,主要致力于通过机器学习提升美团点评平台的活跃用户数,作为技术负责人,主导了美团DSP广告投放、站内拉新等项目的算法工作,有效提升营销效率,降低营销成本。
廷稳,2015年加入美团点评。在美团点评离线计算方向先后从事YARN资源调度及GPU计算平台建设工作。
招聘
美团DSP是美团在线数字营销的核心业务方向,加入我们,你可以亲身参与打造和优化一个可触达亿级用户的营销平台,并引导他们的生活娱乐决策。同时,你也会直面如何精准,高效,低成本营销的挑战,也有机会接触到计算广告领域前沿的AI算法体系和大数据解决方案。你会和美团营销技术团队一起推动建立流量运营生态,支持酒旅、外卖、到店、打车、金融等业务继续快速的发展。我们诚邀有激情、有想法、有经验、有能力的你,和我们一起并肩奋斗!参与美团点评站外广告投放体系的实现,基于大规模用户行为数据,优化在线广告算法,提升DAU,ROI, 提高在线广告的相关度、投放效果。欢迎邮件wuhongjie#meituan.com咨询。













































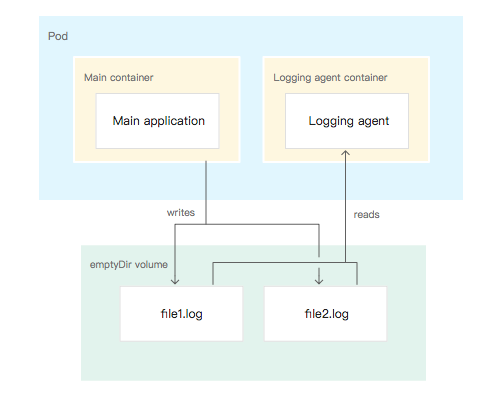
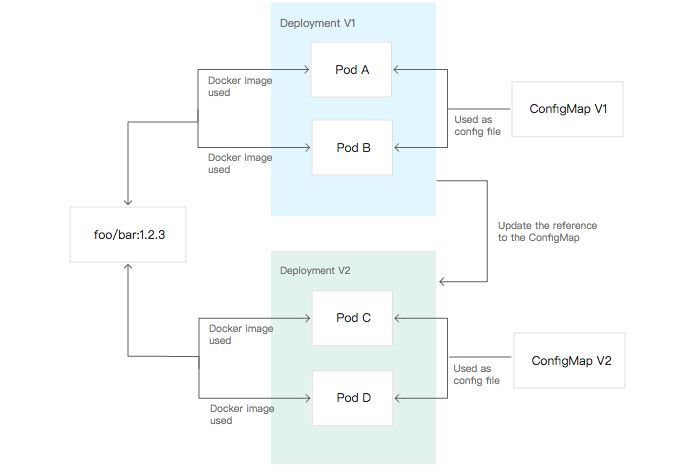 图 3. 如何使用挂载到 pod 配置文件中的 ConfigMaps 更新部署中的配置
图 3. 如何使用挂载到 pod 配置文件中的 ConfigMaps 更新部署中的配置 图 4. Stackdriver Kubernetes Monitoring 中的仪表板
图 4. Stackdriver Kubernetes Monitoring 中的仪表板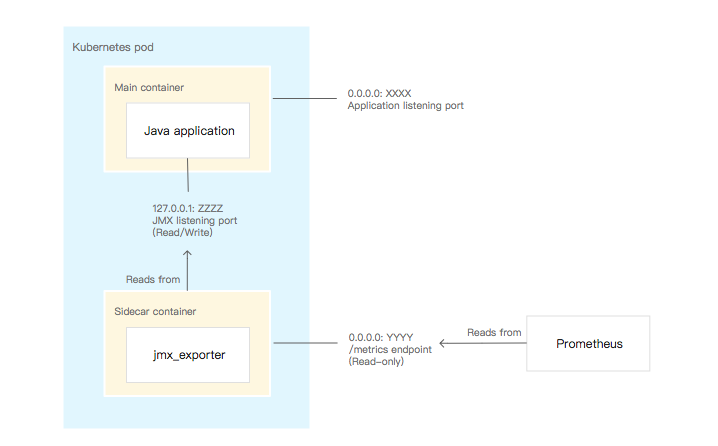 图 5. 用于监控的边车模式
图 5. 用于监控的边车模式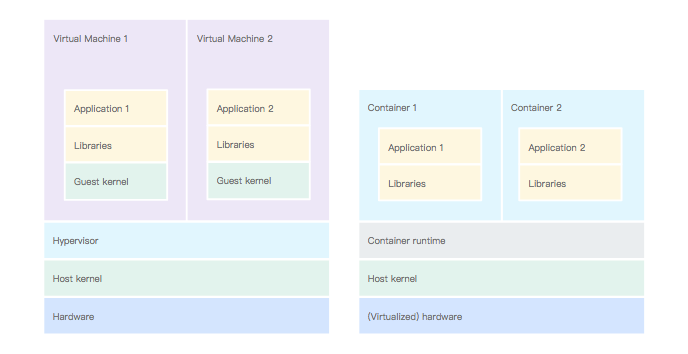 图 6. 左侧,虚拟机使用虚拟化硬件。右侧,容器中的应用程序使用主机内核。
图 6. 左侧,虚拟机使用虚拟化硬件。右侧,容器中的应用程序使用主机内核。











